This web page is now available in PDF format!

This eight-page publication features:
- 102 datasets, some of which are not yet listed on this website
- A critical assessment of existing datasets
- Ideas for the future of RGBD data
- Graphs!
- Tables!
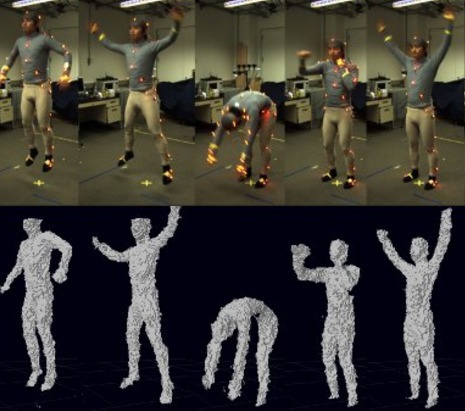
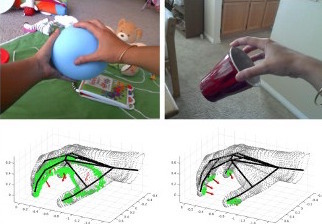
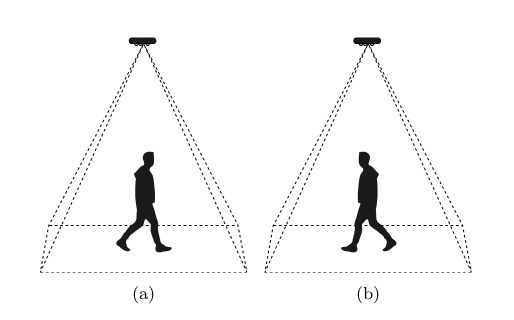
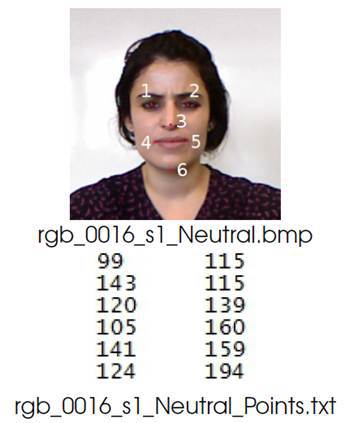
- Pictures!
It has been accepted for publication in the CVPR 2016 workshop `Large Scale 3D Data: Acquisition, Modelling and Analysis'.
@inproceedings{firman-cvprw-2016,
author = {Michael Firman},
title = {{RGBD Datasets: Past, Present and Future}},
booktitle = {CVPR Workshop on Large Scale 3D Data: Acquisition, Modelling and Analysis},
year = {2016}
}